免示教智能焊接机器人系统介绍:
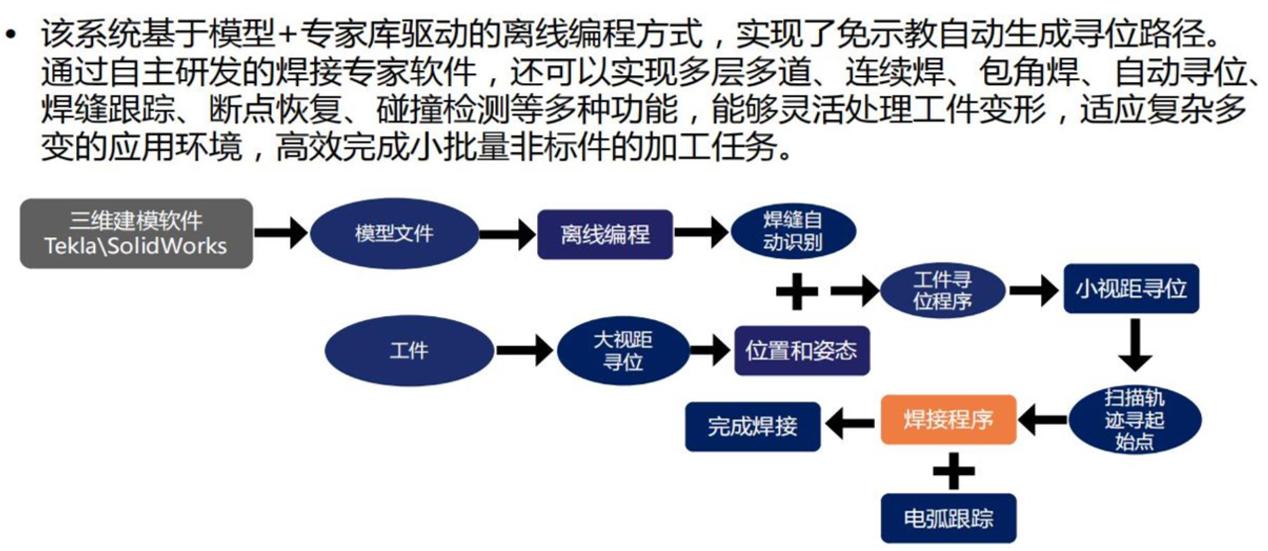
免示教智能机器人焊接系统集成了数字孪生、机器人控制和视觉技术,是面向弧焊应用领域深度开发的一体式解决方案,该系统基于模型+专家库驱动的离线编程方式,实现了免示教自动生成寻位路径和焊接路径。通过自主研发的焊接专家软件,可以实现多层多道、连续焊、包角焊、自动寻位、焊缝跟踪、断点定位、碰撞检测等多种功能,能够灵活处理工件变形,适应复杂多变的应用环境,高效完成小批量非标件的加工任务,功能特点如下:
对接Tekla、SolidWorks等主流三维建模软件,支持.ifc.step.stp格式模型文件。
采用数字孪生技术,可实现软件中机器人与真实工作站中机器人的同步运动。
支持自动计算焊接姿态和寻位姿态,并在软件界面中可视化显示。支持自动规划空移路径,兼具碰撞检测和奇异点规避。
支持船形焊、平角焊、立向上焊、连续包角焊。支持正弦摆、钟摆、L型摆和三角摆摆动焊接。
支持手动三点、机械靠栅停靠和3D相机的方式进行工件初定位。支持飞行寻位、后退寻位、四点寻位和圆弧寻位等多种焊缝精定位方式。
支持焊缝过焊孔位置打断和过焊孔位置连接。支持批量生成焊缝,可节省相似焊缝做刀路时间。
支持连续焊接,可单独设置每条焊缝的推拉角、前变刀距离和后变刀距离支持TCP、手眼标定、工件初定位小范围变化后自动进行刀路调整,支持就近规划运动到加工起始点,减少空移几余,提升加工效率。
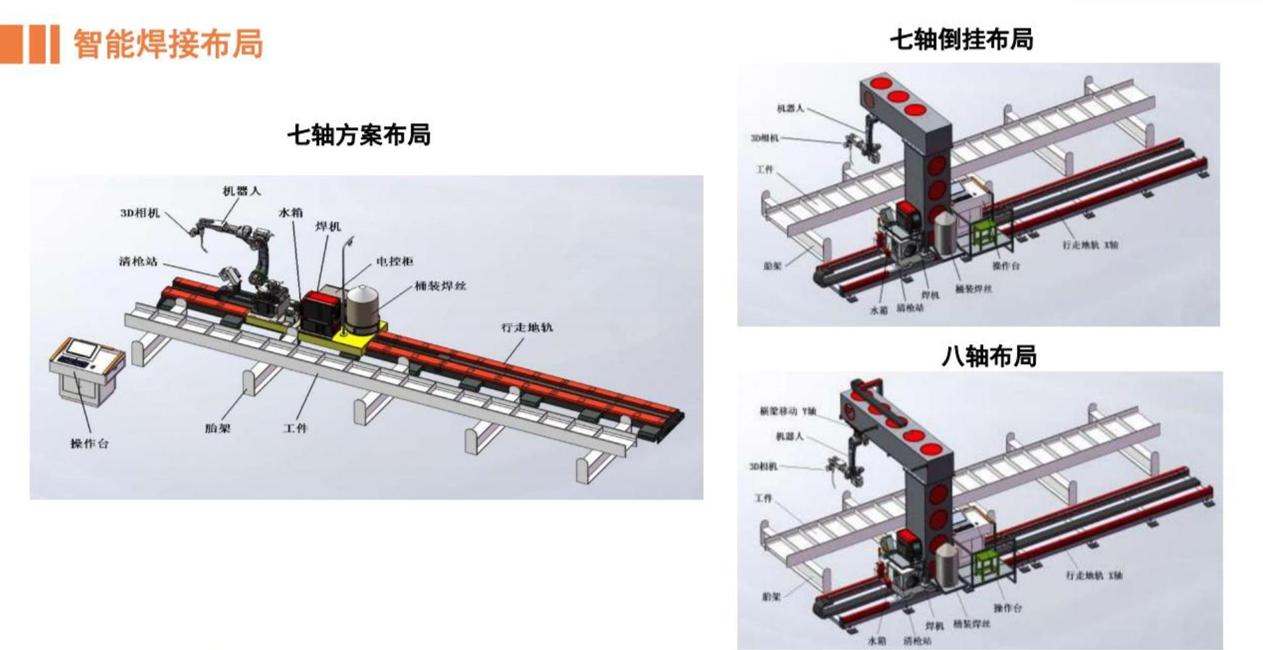
支持固定基座/单地轨/倒装单悬臂/龙门等机型。
支持变位机和机械臂插补运动。
支持导入导出工艺参数文件。
支持断点定位继续加工和在移动后设为断点继续加工。
支持自定义再起弧回退距离,
支持自动清枪剪丝。
支持添加多层多道焊缝,且每道焊道可单独设置焊接工艺支持牛腿参数化建模。
应用案例:
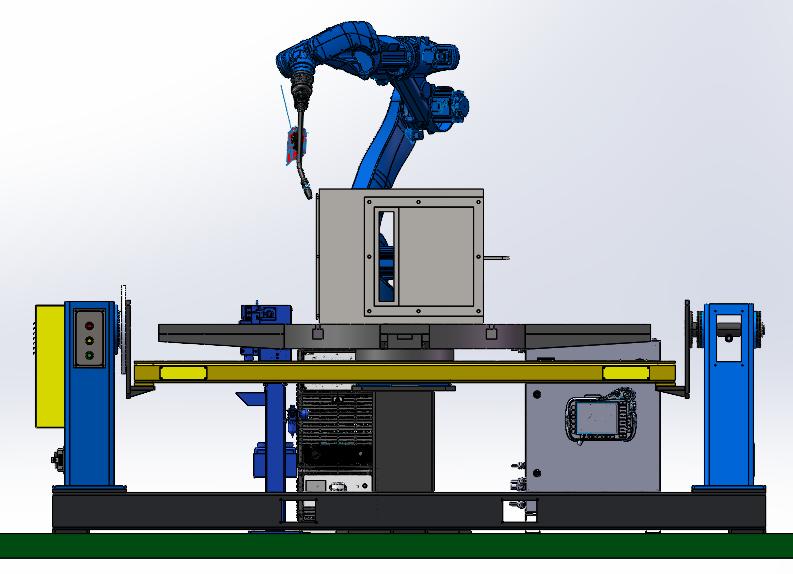
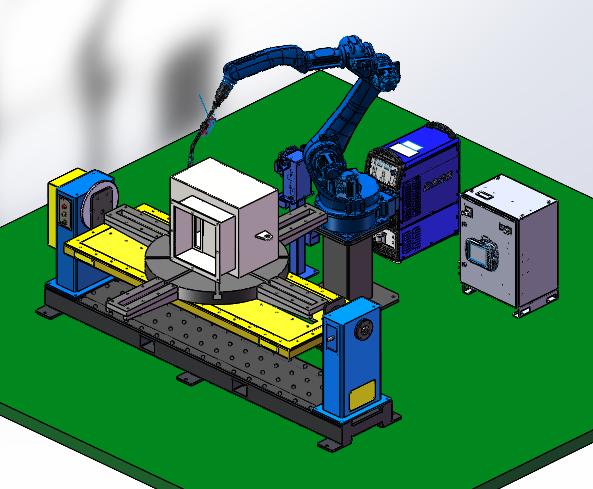
电机出线盒、油箱等箱体焊接免示教焊接机器人有一套免示教焊接机器人本体CYMR2010,臂展2000mm,一套免示教焊接机器人控制系统、一套数字化脉冲水冷气体保护焊机NBC-500RP,一套控制系统,一套双轴U型伺服控制变位机,一套清枪剪丝装置,以及一套机器人底座组成。
工作流程如下:
操作人员手动将点焊好的工件装在双轴伺服变位机上,并进行初步定位和压紧。固定好后,将工件三维图导入免示教焊接机器人系统,自动生成焊接路径,并对焊缝进行工艺参数设定后,启动焊接机器人,机器人自动夹持焊枪到达焊缝位置,按设定的焊接工艺参数开始焊接。具体流程如下:
1)操作人员在将要焊接的工件吊装到焊接变位机上,并进行初步定位和锁紧固定。
2)将工件三维图导入免示教焊接机器人系统,自动生成焊接路径,并对焊缝进行工艺参数设定。
3)操作人员按下启动按钮,机器人采用激光扫描寻位方式开始进行初始焊缝寻位,找到初始焊接位置,开始进行机器人焊接。
4)焊接完道焊缝后,机器人进行继续激光寻位,寻找后面的焊缝并进行焊接。
5)机器人依次将所有的焊缝焊接������完成后,机器人结束本工件焊接,人工卸下工件,等待装夹下一工件。
免示教焊接机器人其他应用方式:
免示教焊接机器人基本应用场景:

 0731-58289708
0731-58289708
 138 7528 5158
138 7528 5158.jpg)
.jpg)